
Dexta Robotics da el siguiente paso en la realidad virtual al crear un guante robótico que permite recrear sensaciones y tocar objetos virtuales. El dispositivo se llama ‘Dexmo’ y se trata de un exoesqueleto mecánico que captura el movimiento de la mano al mismo tiempo que simula el tacto en el mundo virtual. El usuario puede simular y tocar los objetos que recrea Dexmo.
Los creadores de Dexmo vienen desarrollando dos dispositivos:
Dexmo Classic
Captura 11 tipos de movimiento de la mano y tres para el dedo pulgar, además de la flexión de los otros cuatro dedos restantes. Esto permite proporcionar a los desarrolladores datos para crear un modelo de mano más precisa, especialmente para el dedo pulgar.
![[Dexta Robotics] Dexmo + Razer Hydra for Hand Position Tracking](https://i.ytimg.com/vi/9ZPpBcvmlps/hqdefault.jpg)
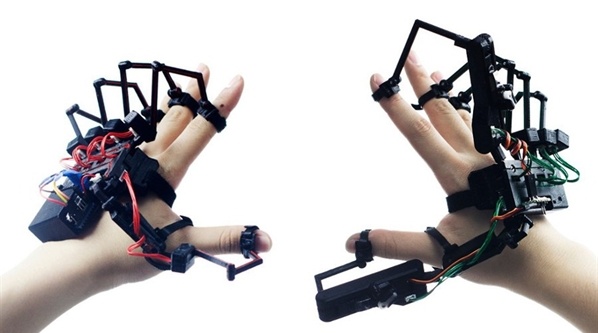
Dexmo F2
Tiene toda la funcionalidad de Dexmo Classic, pero además provee de retroalimentación a la acción de la fuerza (dentro y fuera). Por el pulgar y el dedo índice del exoesqueleto se han incluido dos piezas adicionales de hardware que permiten accionar la fuerza de respuesta, es decir, es como trabajaría un sistema de frenado de discos de engranaje en miniatura. Cuando el avatar que se está controlando golpea un objeto digital, una señal es enviada de regreso a través del software al Dexmo F2, y es en ese momento que se accionan los frenos y se produce el bloqueo.
![[Dexta Robotics] Dexmo+double uArm performing a bomb disposal task](https://i.ytimg.com/vi/B1ZQSoBAP7o/hqdefault.jpg)
Dexta Robotics busca proporcionar con este proyecto la integración de la realidad virtual con el mundo real. Los guantes, además de su aplicación en entornos virtuales, podrían servir también para diversas actividades: fisioterapia, animación, dibujo, son solo algunos ejemplos.
Dexmo se encuentra aún en desarrollo, por ello sus creadores tienen pensado financiar este proyecto a través de una campaña de kickstarter, donde buscan recaudar 200.000 mil dólares para terminarlo. Además, esperan poder vender los guantes de realidad virtual a unos 200 dólares.
Sin duda este proyecto supone uno de los primeros pasos para la inmersión total a la realidad virtual.